
Android系统启动过程分析
整个Android系统的启动分为Linux Kernel的启动和Android系统的启动。Linux Kernel启动起来后,然后运行第一个用户程序,在Android中就是init程序。Linux的启动也从其他文章copy到了本文后半段。
init.cpp
源码路径:/system/core/init/init.cpp1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22int main(int argc, char** argv) {
...
if (is_first_stage) {
mount("tmpfs", "/dev", "tmpfs", MS_NOSUID, "mode=0755");
mkdir("/dev/pts", 0755);
mkdir("/dev/socket", 0755);
mount("devpts", "/dev/pts", "devpts", 0, NULL);
mount("proc", "/proc", "proc", 0, NULL);
mount("sysfs", "/sys", "sysfs", 0, NULL);
}
...
if (!is_first_stage) {
// Indicate that booting is in progress to background fw loaders, etc.
close(open("/dev/.booting", O_WRONLY | O_CREAT | O_CLOEXEC, 0000));
property_init();
...
}
start_property_service();
init_parse_config_file("/init.rc");
...
}
主要做了以下工作:
- 在系统第一阶段(stage1),挂载系统目录
- 在第二阶段(stage2),初始化属性服务(property_service)
- 分析并执行init.rc脚本
解析zygote
init.rc
位置:/system/core/rootdir/init.rc
先来分析一下init.rc,这是android系统的启动配置文件,包括Android的启动第一个应用进程zygote的执行命令也是这个文件中。解析部分文件内容如下:
1 | 11import /init.${ro.zygote}.rc |
值得注意的是跟之前的不同,zygote不再是直接写在文件中,而是通过import来导入,查看同级目录下有4个文件:
根据ro.zygote的值不同,来导入不同的文件,zygote64.rc内容:
1 | 1 service zygote /system/bin/app_process64 -Xzygote /system/bin --zygote --start-system-server |
init.rc文件包含五个类型的声明:
- Action :动作
- Commands :命令
- Service :服务
- Options :服务的参数
- Import :导入
结合keywords.h可以查看文件中诸如class_start、import等关键字对应的命令类型。在头文件中on和service关键字被定义为了SECTION类型。
跟进上述init.cpp的init_parse_config_file方法,进入init_parser.cpp,在该方法内部实际调用了parse_config->parse_new_section,对zygote(service zygote)来说,主要是parse_service和parse_line_service两个方法。
1 | case K_service: |
Service结构体
在具体查看解析代码之前,先来介绍一下Service这个结构,因为最后文件的内容都要被解析成相关的信息,而Service就是存储这些信息的结构体。
1 | struct service { |

启动zygote
init.rc中有一段是
1 | 403 on boot |
class_start是一个COMMAND,main是类名,上述zygote文件中line2通过class main来把类名修改为main,所以这里就是启动zygote服务所属的类。
从builtin.cpp的do_class_start一步步调用到init.cpp的service_start方法。
1 | ... |
通过fork以及调用execve来执行/system/bin/app_process64文件来创建zygote进程。
Linux系统启动过程分析
Linux系统启动流程图如下:
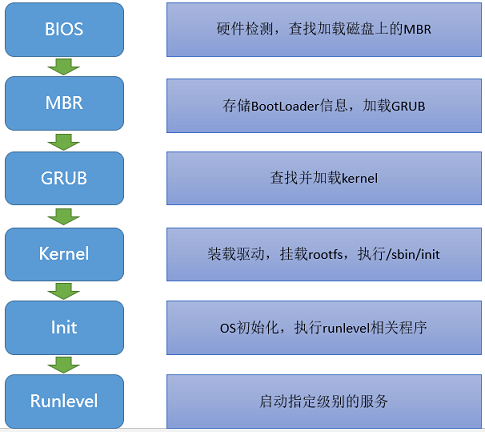
BIOS
BIOS(Basic Input/Output System),基本输入输出系统,该系统存储于主板的ROM芯片上,计算机在开机时,会最先读取该系统。BIOS会按照启动顺序去查找第一个磁盘头的MBR信息,并加载和执行MBR中的Bootloader程序,若第一个磁盘不存在MBR,则会继续查找第二个磁盘,一旦BootLoader程序被检测并加载到内存中,BIOS就将控制权交接给了BootLoader程序。
MBR
MBR(Master Boot Record),主引导记录,MBR存储于磁盘的头部,大小为512bytes,其中,446bytes用于存储BootLoader程序,64bytes用于存储分区表信息,最后2bytes用于MBR的有效性检查。
BootLoader
主要功能是初始化硬件设备、准备好软件环境,最后调用操作系统内核。
- Bootloader:上电后第一个程序。
- Boot parameters:分区中一般存放一些可设置的参数,比如IP地址、串口波特率,要传递给内核的命令行参数。
- kernel:嵌入式板定制的内核,包含内核启动参数
- Root filesystem文件系统:里面包含了linux能够运行的应用程序,和相关库等。
GRUB
GRUB(Grand Unified Bootloader),多系统启动程序,其执行过程可分为三个步骤:
Stage1:这个其实就是MBR,它的主要工作就是查找并加载第二段Bootloader程序(stage2),但系统在没启动时,MBR根本找不到文件系统,也就找不到stage2所存放的位置,因此,就有了stage1_5
Stage1_5:该步骤就是为了识别文件系统
Stage2:GRUB程序会根据/boot/grub/grub.conf文件查找Kernel的信息,然后开始加载Kernel程序,当Kernel程序被检测并在加载到内存中,GRUB就将控制权交接给了Kernel程序。
Kernel
Kernel,内核,Kernel是Linux系统最主要的程序,实际上,Kernel的文件很小,只保留了最基本的模块,并以压缩的文件形式存储在硬盘中,当GRUB将Kernel读进内存,内存开始解压缩内核文件。讲内核启动,应该先讲下initrd这个文件,initrd(Initial RAM Disk),它在stage2这个步骤就被拷贝到了内存中,这个文件是在安装系统时产生的,是一个临时的根文件系统(rootfs)。因为Kernel为了精简,只保留了最基本的模块,因此,Kernel上并没有各种硬件的驱动程序,也就无法识rootfs所在的设备,故产生了initrd这个文件,该文件装载了必要的驱动模块,当Kernel启动时,可以从initrd文件中装载驱动模块,直到挂载真正的rootfs,然后将initrd从内存中移除。
Kernel会以只读方式挂载根文件系统,当根文件系统被挂载后,开始装载第一个进程(用户空间的进程),执行/sbin/init,之后就将控制权交接给了init程序。
init
init,初始化,该程序就是进行OS初始化操作,实际上是根据/etc/inittab(定义了系统默认运行级别)设定的动作进行脚本的执行,第一个被执行的脚本为/etc/rc.d/rc.sysinit,这个是真正的OS初始化脚本
Runlevel
runlevel,运行级别,不同的级别会启动的服务不一样,init会根据定义的级别去执行相应目录下的脚本,Linux的启动级别分为以下几种:
0:关机模式
1:单一用户模式(直接以管理员身份进入)
2:多用户模式(无网络)
3:多用户模式(命令行)
4:保留
5:多用户模式(图形界面)
6:重启